
科技力MAX!6款体检“神器”解决建筑“疑难杂症”
由广东省住房和城乡建设厅香港特别行政区政府发展局联合指导粤港澳智能建造产业发展联盟香港建造业议会共同主办深圳市住房和建设局协办的第一届粤港澳建筑机器人大赛圆满落幕深圳的多家科技企业表现抢眼成为本次大赛的“明星战队”!
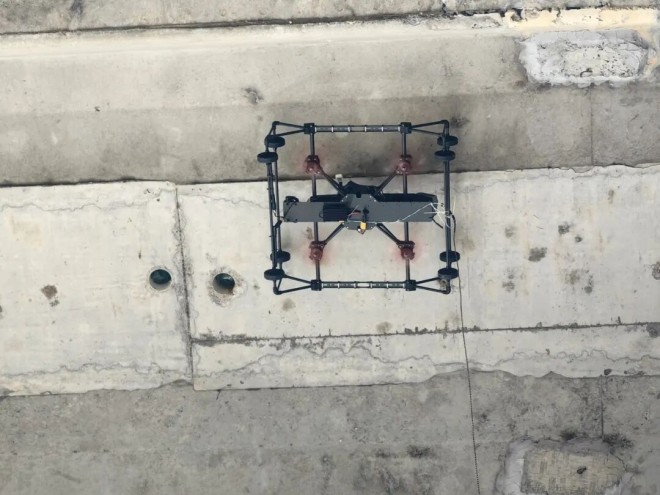
一、磁吸附爬壁式无人机(外墙、桥架支座等检测)
研发单位:中冶建筑研究总院(深圳)有限公司
获奖类别:设计之星--技术研发竞赛

应用背景
在超高层建筑外墙、大型钢结构等高空场景的巡检中,传统方式面临两大困境:一是人工巡检风险高、效率低,难以实现全覆盖;二是普通无人机受风力影响大,无法贴近表面进行精细检测。磁吸附爬壁式无人机应运而生,通过搭载可见光相机的智能无人装备,结合深度学习与多模态融合技术,为高空近距离检测提供了安全高效的解决方案。
技术核心
吸附黑科技:磁吸附+贴壁飞行双模态实现无人机在钢结构建筑表面稳定附着与贴壁飞行作业。
动力革新:共轴双桨系统在体积与重量控制下负载能力较同类产品提升约1.5倍,集成可见光、红外、激光等多类型检测传感器,适配多场景巡检任务。
导航突破:高精度定位系统+自主导航技术,保障复杂空间环境(如钢结构构件间、幕墙缝隙等)中高精度飞行。
稳控秘籍:抗扰流控制算法+融合姿态补偿算法,克服风流扰动、气流回旋等复杂气动干扰。
AI慧眼:智能缺陷识别+结构检测算法,识别钢结构螺栓缺失与锈蚀的准确率超95%,识别幕墙裂纹、结构胶老化等缺陷的准确率超90%。
应用效果
填补超高层建筑近距离检测空白,实现高层建筑、桥梁、大型钢结构、幕墙等高空或危险作业环境下的高精度智能巡检与结构健康监测。
实现沿墙体自主攀爬作业,有效克服传统飞行器在超高层、大风环境中作业受限的问题。
替代高风险人工作业,显著提升检测安全性。
灵活穿行于建筑表面,深入传统无人机难以接近的角落和细部区域,极大提高巡检的覆盖率和数据精度。
多模态检测能力适应钢结构、幕墙等多场景需求。
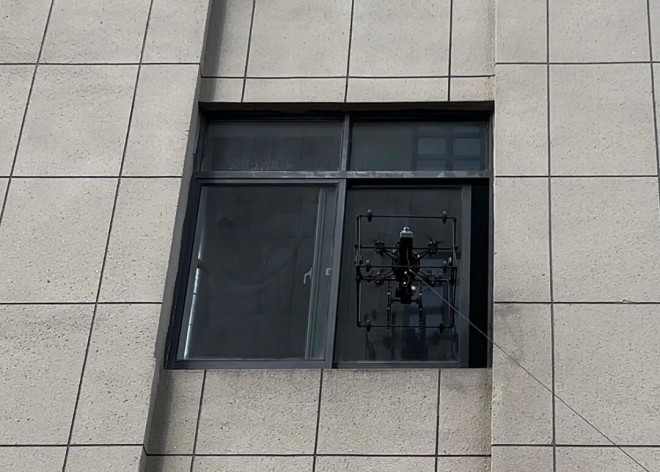

二、SCIM智能爬墙机器人(幕墙检测)
研发单位:哈尔滨工业大学(深圳)
获奖类别:设计之星--技术研发竞赛
应用背景
传统“蜘蛛人”对玻璃幕墙检查的高空作业模式存在明显局限:抽检覆盖率不足40%,年均事故率达0.3‰,既无法满足全面检测需求,又存在较大高空作业安全风险。SCIM智能爬墙机器人以“全地形自适应+AI全栈式运维”技术体系,提供合规高效的智能解决方案,有效破解这一行业难题。
技术核心
全工况稳定附着系统:涵道涡轮风扇+绳驱复合吸附系统,产生稳定吸附力,稳定贴合玻璃、石材、金属等多材质立面;空气动力学优化设计,抵御强风干扰;万向轮底盘实现灵活移动。
多模态智能检测引擎:硬件层,集成高清相机与热红外成像模组,构建“可见光+红外”双光图像采集体系;算法层,深度学习模型+多模态数据融合,实现微裂纹、漏胶等隐患精准捕捉,“可见光+红外图像融合”洞察隐蔽缺陷;推理层,边缘计算模块联动无人机外墙初步扫描结果,形成“宏观快速检测-微观详细验证”的点面协同检测体系。
靶向修复执行单元:自适应注胶装置可适应多材质立面场景,实现“缺陷识别-路径规划-材料适配-精准修复”的闭环作业。
应用效果
狭窄空间(最小作业间隙30cm)的灵活穿梭,覆盖人工吊篮难以抵达的运维盲区。玻璃缺陷识别准确率85%,密封胶损伤识别率80%(数据基于测试样本)。实时缺陷分析推理耗时≤200ms。检测效率较人工提升3倍。靶向修复精准,可有效延长建筑外围护系统使用寿命。替代“蜘蛛人”高空作业,实现本质安全。
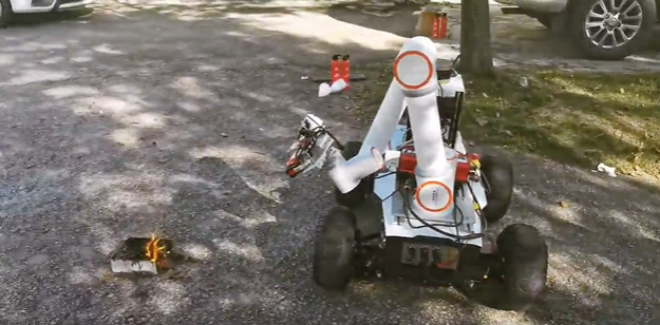
三、智能建造智能巡检灭火机器人
研发单位:深圳大学土木与工程学院
获奖类别:设计之星--技术研发竞赛
应用背景
建筑施工和运营场所的消防安全至关重要,传统消防监管依赖人工巡查,存在响应滞后、盲区多等痛点,特别是在大范围场地中,火灾隐患往往难以及时发现。智能巡检灭火机器人通过自主监控,实现了从被动处置到主动预防的转变,大幅提升消防安全管理水平。
技术核心
独立除雾除霜模块:解决室外环境温差相机仓镜头起雾问题。
上下主轴一体化结构:避免云台相机仓、红外仓颠簸错位,稳压模块过滤车辆瞬时不稳定电流,使云台保持稳定状态。
云台“全知视角”:超高强度铝合金设计,防护等级IP66红外夜视补光100米画质清晰度。
超长续航:无刷直流永磁驱动器,连续工作12小时。
火源精准定位:SLAM算法+视觉算法,精准识别火源,发现明火或烟雾后报警或自动启动灭火装置。智能建造智能巡检灭火机器人
应用效果
自动规划路线,定时巡逻,无人值守自主巡检。3小时快充满足半天作业需求。实现明火识别到灭火全程自动化。有效提升工地消防安全管控水平。
四、隧道特种检测机器人
研发单位:中铁建南方建设投资有限公司中铁十二局集团有限公司
获奖类别:最佳表现+创新之星--技术研发竞赛
应用背景
隧道工程结构复杂,检测工作往往受限于空间狭小、环境恶劣等条件,检测效率和质量低下。隧道特种检测机器人集成了隧道混凝土质量特种检测机器人、空气耦合雷达、智能监控系统三项关键技术,克服了传统检测方法的局限,为隧道结构健康监测提供了全新的技术路径。隧道特种检测机器人
技术核心
两栖设计:空、陆两栖作业,适应于各种检测环境。
全景扫描:环向检测技术,提升隧道检测覆盖率。隧道环向检测
即时传输:5G实时数据上传,AI自动生成检测报告。
智能诊断:混凝土衬砌缺陷智能识别算法。
自主巡航:智能路径规划,匀速精准检测。数据实时回传
应用效果
实现隧道全断面无损检测。可在不影响现场施工的前提下开展工作,替代人工高空作业,降低安全风险。衬砌厚度不足、脱空等缺陷的秒级预警。构建全生命周期监测体系。
五、轨道交通智能修复机器人
研发单位:深圳市地铁集团有限公司中铁南方投资集团有限公司中铁西南科学研究院
获奖类别:创新之星--技术研发竞赛
应用背景
地铁运营隧道结构钢环加固作业长期面临着4轴机械臂空间灵敏度差、重复精度低、钢板末端晃动大、人机配合作业辅助作业繁杂、天窗时间利用率低等问题。轨道交通智能修复机器人系统融合三维视觉识别技术和空间路径规划技术,有效解决以上痛点,实现运营隧道钢环拼装作业全程无人化、智能化施工。轨道交通智能修复机器人
技术核心
复杂环境自适应:可移动式凹底载运车+内置式调平系统,±0.3°高精度自适应调平。
高精度钢板拼装:机器人自身重复精度±0.2mm,视觉系统识别精度±2mm,识别准确率达99%以上,同时引入高精度3D相机+智能算法,精准识别、定位钢板抓取以及拼装位置定位。
灵活机械臂:6自由度机器人系统+三维空间定位技术,隧道狭窄空间内自由活动、自动规划。
作业“效率王”:10min内完成钢板抓取、拼装到位,施工效率提升数10倍。自动拼装
智能控制:PLC高度集成系统+人机信息交互平台,实现一键式操作。
应用效果
降低施工综合成本5%-10%。钢环拼装纵向误差<2mm,较传统机械设备质量提升8.8倍。原始拼装工效由37min/块推进至24min/块,施工效率提升35%。
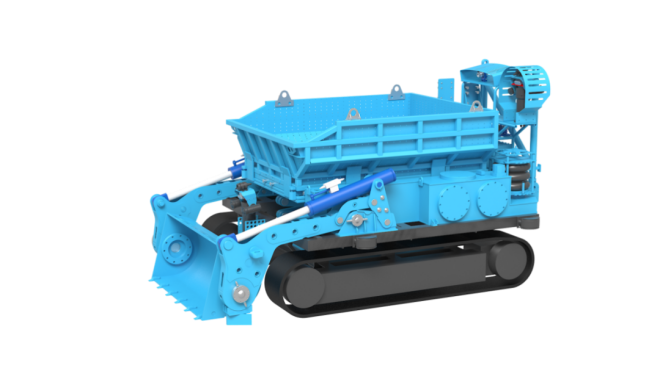
六、装载式箱涵清淤机器人
研发单位:中建三局集团(深圳)有限公司中建三局绿色产业投资有限公司
获奖类别:创新之星--技术研发竞赛
应用背景
城市箱涵清淤一直是市政运维的难点,传统人工清淤的作业环境恶劣、效率低下。现有管道机器人多适用于小直径管道,对大尺寸箱涵场景力不从心。装载式清淤机器人针对复杂工况设计,有效解决了大尺寸排水管网清淤的行业难题。
技术核心
超大推力:15T水平推力铲储一体化清淤系统,满足各类复杂清淤工况。
极速作业:大容量可升降分体式设计,40秒完成推、挖、倒、运全套清淤动作。
节能先锋:节能化液压动力系统,自动调节执行机构速度及压力,比传统机器人能耗降低25%-30%。
有限空间灵活行走:高机动履带行走系统+应急管理模块,实现最大行进速度21m/min、20度爬坡能力,零转弯半径原地转向,比传统机器人减少被困时撤出阻力50%以上。
全方位感知:声学监测+光学监测+传感器系统多元化监测,比传统机器人探测范围提升50%以上。
应用效果
清淤效率最大18水下自然方/小时,较人工清淤提升2-3倍。无需围堰砌筑、污水倒排等工序,缩短工期50%以上。排泥含水率<60%以下。综合清淤成本比人工降低40%以上。实现井下无人化作业,提升管网效能。
(来源:深圳市住房和建筑局)
